Роботы-хирурги будущего. В настоящее время ученые заняты исследованием процесса взаимодействия человека и машины в качестве операционной бригады. Для автоматизации рутинных действий или предугадывания намерений хирурга с целью автоматизации смены инструментов могут использоваться учебные модели. Автоматизация также позволит хирургу одновременно задействовать более, чем две руки, как, например, в системе Да Винчи.
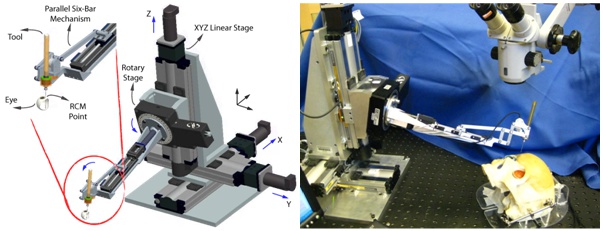
Робот JHU Steady-Hand Eye используется в микрохирургии сетчатки глаза. Хирург-человек контролирует инструмент с помощью манипулятора этого робота. Таким образом, уменьшается дрожание руки, и достигаются более точные и четкие движения.
В Вашингтонском Университете создана система Raven — впечатляющий мобильный робот-хирург, предназначенный для дистанционного проведения операций. В качестве гранта данную систему получат семь медицинских школ: Университет Джона Хопкинса, Университет Санта-Круз (Калифорния), Вашингтонский Университет, Университет Беркли (Калифорния), Гарвард, Университет Небраски, и Лос-Анджелесский Университет (Калифорния). Также заявки на систему поступили из медицинских школ Флориды, Торонто и Миннесоты. Вышеупомянутая стандартная платформа для исследований в области хирургии позволит провести захватывающее изучение в области дистанционного проведения операций, а также даст возможность выполнять учебные операции.
Raven — мобильная система, применяемая в лапароскопической хирургии. Благодаря модульной конструкции, Raven является более мобильным по сравнению с массивными хирургическими роботами, применяемыми в больницах. Небольшая группа людей может его как разобрать, так и собрать вновь. Raven весит всего лишь 23 кг, что является преимуществом перед существующими хирургическими роботами, вес которых достигает полтонны. Модульность этого робота позволяет размещать его в опасных местах.
Эксперименты, которые проводились с роботом Raven, главным образом касались оперирования в полевых условиях, когда сам хирург находится в безопасном месте и управляет оттуда роботом. Например, проводились операции на подводной лодке и в пустыне под палящим солнцем и при порывистом ветре. Управление и обратная связь осуществлялись через беспроводное соединение. Изучались такие аспекты как количество хирургов, которые могут одновременно управлять роботом для завершения операции, влияние временной задержки сигнала на ход операции, а также был предпринят поиск наиболее эффективного способа обучения хирургов на базе данной платформы.
Не стоит забывать и то, что в операционной условия значительно отличаются от других мест. И причиной тому являются постоянно передвигающиеся объекты, отсутствие идентичных процедур, вопросы стерильности и необходимость удовлетворения требований Управления по санитарному надзору за качеством пищевых продуктов и медикаментов.
Хотя на сегодняшний день роботизированная хирургия далека от состояния «Нажал на кнопку — операция прошла успешно!», но качественная подготовка специалистов на базе робот-систем уже стала реальностью.